Kinematic model of a hand: each finger has 3 joints with 4 DoF : index
4.6
(319)
Write Review
More
$ 22.00
In stock
Description
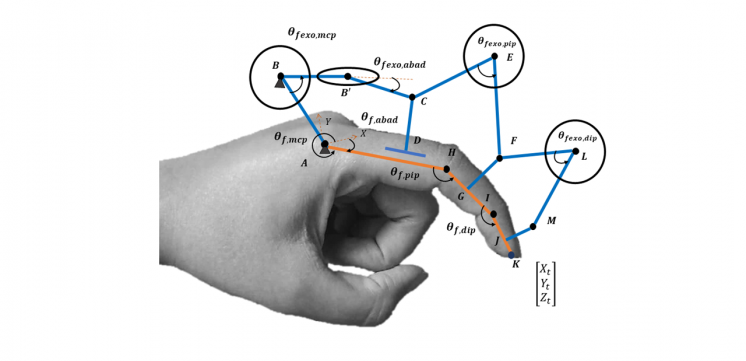
Fingertip Position and Force Control through Maestro Hand Exoskeleton

Kinematic Joint - an overview
Kinematic model of a hand: each finger has 3 joints with 4 DoF : index

Kinematic model of a hand: each finger has 3 joints with 4 DoF : index

Human hand kinematic data during feeding and cooking tasks

Finger Kinematic Modeling and Real-Time Hand Motion Estimation

Formalization of the inverse kinematics of three-fingered dexterous hand - ScienceDirect

Massimiliano Solazzi's research works Scuola Superiore Sant'Anna, Pisa (SSSUP) and other places

Mine Sarac
Sensors, Free Full-Text




You may also like




