
Minimum cube volume of two grippers performing a knot-tying task

Learning-based cable coupling effect modeling for robotic manipulation of heavy industrial cables
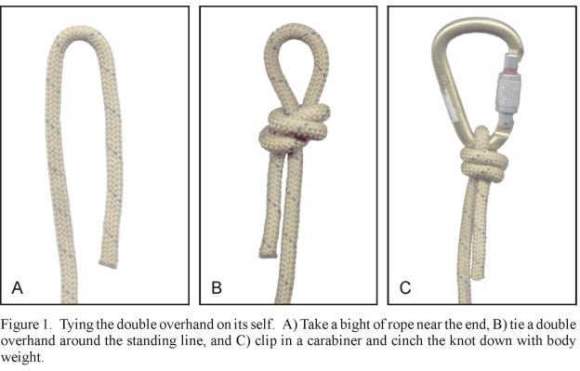
Double Overhand On Itself Slow-Pull Testing
Proceedings (14 MB PDF) - 4th CIRP Conference On Assembly

Generation of synchronized configuration space trajectories with workspace path constraints for an ensemble of robots - Ariyan M Kabir, Shantanu Thakar, Rishi K Malhan, Aniruddha V Shembekar, Brual C Shah, Satyandra K

Stereovision based force estimation with stiffness mapping in surgical tool insertion using recurrent neural network

Applied Sciences, Free Full-Text

Iterative residual policy: For goal-conditioned dynamic manipulation of deformable objects - Cheng Chi, Benjamin Burchfiel, Eric Cousineau, Siyuan Feng, Shuran Song, 2023

System Overview: The PRM-based global planner (Planner)

Full article: Haptics in minimally invasive surgery – a review

Master–slave robotic platform and its feasibility study for micro‐neurosurgery - Mitsuishi - 2013 - The International Journal of Medical Robotics and Computer Assisted Surgery - Wiley Online Library

PDF) Improved Knot-Tying Methods for Autonomous Robot Surgery









